- Steuerungen

- DC-Servoverstärker
- BL-Servoverstärker für 12, 24, 48, 90 und 180Vdc
- BL-Servoverstärker bis 230Vac
- BL-Servoverstärker 3x 400Vac
- Servoregler für raue Umgebungsbedingungen
- Schrittmotorsteuerungen
- CAN-Interfaces
- CAN-Datenlogger
- CAN-Cloud-Interface
- Automotive Ethernet
- Zubehör
- Ansteuerungen für Hubmagnete und Drehmagnete
- Motoren
- Aktuatoren
- Elektromechanik
Tauchspulen Übersicht
Tauchspulen mit Eigenlagerung VM-Serie
2-achsige Voice-Coil-Motoren als Kippantrieb
Tauchspulen ohne Eigenlagerung CVC-Serie flache Tauchspulen ohne Eigenlagerung RVC-Serie Voice-Coil-Aktuatoren mit Eigenlagerung CVCA-Serie Flache Voice-Coil-Aktuatoren mit Eigenlagerung RVCA-Serie
Tauchspulen ohne Eigenlagerung CVC-Serie flache Tauchspulen ohne Eigenlagerung RVC-Serie Voice-Coil-Aktuatoren mit Eigenlagerung CVCA-Serie Flache Voice-Coil-Aktuatoren mit Eigenlagerung RVCA-Serie
TAUCHSPULENAKTOREN (VOICE COIL AKTUATOREN, VCM)
Der Voice-Coil-Aktor (Tauchspulenaktor, Schwingspulenaktor) ist die technische Umsetzung des Lorentz-Kraft-Prinzips: die Kraft eines stromdurchflossenen Leiters im Permanentmagnetfeld ist proportional zur Magnetfeldstärke und zum Strom. Durch die Umkehr der Stromrichtung ändert sich auch die Kraftrichtung und man kann so bidirektionale Aktuatoren mit gleichem Verhalten in beide Arbeitsrichtungen realisieren - sowohl rotatorisch als auch linear. Elektrisch gesehen ist der Voice-Coil-Motor (VCM, Tauchspulenmotor, Schwingspulenmotor) ein einphasiger Motor und kann auch wie ein DC-Motor angesteuert werden. Der lineare Voice-Coil-Aktor ist also defakto ein Kurzhub-DC-Linearmotor mit kleinem Hub, der rotatorische Voice-Coil-Aktuator ein Drehaktor mit beschränktem Winkelbereich (Limited Angle Torquer). Durch die vergleichsweise kleinen bewegten Massen eigenen sich Voice-Coil-Antriebe für besonders dynamische Anwendungen mit hoher Bewegungsfrequenz. Dabei weist der Voice-Coil-Aktor eine besonders kleine Hysterese auf und ist somit optimal für Anwendungen geeignet, die eine gut kontrollierbare Bewegung in beide Richtungen mit gut reproduzierbaren Verhalten bei Richtungsumkehr erfordern. Auch die Geräuschbildung, geringes Überschießen oder eine sehr feinfühlige Kraft können Anforderungen sein, die mit Voice-Coil-Motoren gut erfüllt werden können.
Wie andere Motoren entwickeln auch Voice Coil Motoren eine Gegenspannung (Back-EMF), die proportional zur Relativ-Geschwindigkeit zwischen Spule und Magnetpott ist, so dass sie bei konstanter Last und Speisung mit konstanter Spannung im stationären Zustand eine konstante Geschwindigkeit erreichen würden. Da der Spulenwiderstand der Schwingspule temperaturabhängig ist, erreicht man konstante Kraftverhältnisse nur mit einem Servoregler im Stromregelungsmodus. Je nach Tauchspulenmotor stehen verschiedene Wicklungsoptionen zur Verfügung, so dass die Optimierung auf verschiedene Betriebsspannungen 12V, 24V, 90V, 180V (DC) möglich ist.
Generelle Eigenschaften eines Voice-Coil-Aktors (Tauchspulen-Aktuators, Schwingspulen-Aktuators):
- proportionales Verhalten: Positionierung bis ca. 30mm / 45°
- hohe Dynamik durch kleine bewegte Massen, geeignet für ultra-hohe Frequenzen
- hoher Wirkungsgrad für batteriebetriebene Systeme oder temperaturempfindliche Anwendungen
- gute Steuerbarkeit für geringe Geräuschentwicklung oder geringen Schock / Vibrationen
- sehr kleine Hysterese für extrem gute Wiederholbarkeit auch bei Kraft-Richtungsumkehr
- keine Rastkraft
- hohe Überlastfähigkeit
- verschiedene Wicklungsoptionen für Betriebsspannungen 12V, 24V, 90V, 180V (DC)
Voice-Coil-Motoren werden häufig als reine Motoren ausgeführt, bei denen das Feedback für die Regelung aus Größen in der Anwendung kommt, wie dies z.B. bei der Druckregelung oder Gasmischung in medizinischen Geräten oder allgemeinen Ventilen der Fall ist. Kunden, die die Integration des Voice-Coil-Antriebs in Ihre Anwendung komplett selbständig durchführen möchten nutzen die runden Voice-Coil-Motoren der CVC-Serie oder flachen Voice-Coil Motoren der RVC-Serie ohne Lagerung von PBA oder die Voice-Coil-Aktuatoren der VM-Serie unseres Herstellers Geeplus (mit Gleitführung als Standard, Versionen ohne Führung verfügbar).
Für Positionieranwendungen stehen Tauchspulenantriebe (Schwingspulenantriebe) als fertig integrierte Linearmotortische zur Verfügung, bei denen der Voice-Coil-Motor Teil eine mechanischen Linearachse mit Linearführung wie z.B. eines linearen Kreuzrollenkugellager, und eines optischen Encoders ist; Beispiele für solche Linearmotorachsen für ultra-hochfrequente Linearbewegungen mit kurzem Hub sind die CVCA-Serie mit runden Voice-Coil-Motoren oder die RVCA-Serie als quaderförmige und extra flache Voice-Coil-Antriebe unseres Herstellers PBA.

VOICE COIL AKTUATOREN / TAUCHSPULENANTRIEBE MIT GLEITLAGERUNG (VM)
Die Voice Coil Motoren der VM Serie unseres Herstellers Geeplus sind als Aktuator Komponenten ausgeführt. In der Standardausführung sind diese Voice Coil Aktuatoren linear und die bewegte Spule ist in einem Gleitlager geführt; Positionssensoren sind nicht integriert. Optional können die Voice Coils natürlich auch ohne Eigenlagerung ausgeführt werden und auch kundenspezifische Varianten in anderen Baugrößen und Bauformen (z.B. auch rotatorisch) sind möglich. Die VM-Voice-Coil-Aktoren adressieren vor allem Anwendungen, die eine gut kontrollierbare Bewegung in beide Richtungen erfordern, wie dies z.B. in medizinischen oder optischen Geräten der Fall ist. Sie können eine gleichmäßige Kraft in beide Bewegungsrichtungen entwickeln, wenn sie bipolar angesteuert werden. Dabei weisen sie eine besonders kleine Hysterese auf (typisch zwei Größenordnungen kleiner als vergleichbare Proportionalmagnete), was z.B. vor allem in anspruchsvollen Ventilanwendungen in der Medizintechnik, die eine extrem feinfühlige Verstellung in der Gasmischung erfordern (z.B. in Beatmungsgeräten), eine entscheidende Anforderung sein kann.
Als Servoregler für Tauchspulenantriebe (Schwingspulenantriebe) kommen unsere DC-Servoregler Junus (Strom- oder Geschwindigkeitsregelung (Back-EMF)) in Frage.
Kabelanbindung bei einem Voice Coil Aktor der VM-Serie
Ein großes Problem bei der Anwendung eines Voice Coil Aktuators stellt häufig die Anbindung der bewegten Spule (Schwingspule) an die Außenwelt dar. Unser Hersteller Geeplus hat hierfür eine Lösung mit sogenannten Flex Circuits entwickelt, wie sie auch bei Druckern eingesetzt werden (bewegte Druckköpfe). Standardmäßig ist diese Lösung derzeit nur für den VM2618, VM3322, VM4032, VM5042 und den VM8054 erhältlich; wegen der zusätzlichen Länge für den Deckel des Flex Circuits ändert sich die Bezeichnung auf auf VM2836, VM3334, VM4040, VM5050 bzw. VM8080 elektrisch ändert sich aber nichts (die Daten können 1:1 von den Basistypen übernommen werden). Für alle anderen Typen sollten hier für die Anbindung hochflexible Kabel verwendet werden.
")

| Modell | Kraft Dauer / Spitze |
Hub gesamt / linear |
Leistung (Dauer) |
Gewicht gesamt / Spule |
Abmessungen d x h |
Daten- blatt |
Zeichnung 3D |
| N | mm | W | g | mm | .igs | ||
| VM13xx | tbd. | tbd. | tbd. | tbd. | 13 x xx | in Vorbereitung | in Vorbereitung |
| VM1614 | 0,8 / 2,3 | 6 / 4 | 5 | 15 / 3 | 16 x 14 |  |
 |
| VM2436 | 2,7 / 7,5 | 20 / 10 | 12,5 | 98 / 9 | 24 x 36 | |
|
| VM2618 | 3,4 / 10,6 | 8 / 4 | 8 | 60 / 6 | 26,3 x 16 | |
|
| VM2836* | 3,4 / 10,6 | 4 / 4 | 8 | 60 / 6 | 28 x 37 | |
|
| VM3225 | 4,9 / 10 | 12,5 / 6 | 8 | 120 / 25 | 32 x 25 | |
STEP |
| VM3322 | 5,0 / 14 | 6 / 4 | 8 | 140 / 7 | 33 x 22 | |
|
| VM3334* | 5,0 / 14 | 6 / 4 | 8 | 140 / 7 | 33 x 34 | |
|
| VM3850RB | 9 / 32 | 7 / 6 | 12 | 224 / 19 | 38 x 51 | |
|
| VM4032 | 9 / 26 | 12 / 9 | 16 | 230 / 25 | 40 x 31 | |
|
| VM4040* | 9 / 26 | 8 /8 | 16 | 230 / 25 | 40 x 40 | |
|
| VM5042 | 19 / 54 | 8 / 7 | 24 | 480 / 35 | 50,1 x 42 | |
|
| VM5050* | 19 / 54 | 8 / 7 | 24 | 480 / 35 | 50,1 x 50 | |
|
| VM6340 | 31 / 104 | 8 / 3 | 24 | 750 / 40 | 63,1 x 38 | |
|
| VM6340L | 32 / 116 | 12 / 7 | 28 | 750 / 43 | 63,1 x 38 | |
|
| VM6548 | 24 / 77 | 20 / 13 | 28 | 950 / 90 | 65 x 48 | |
|
| VM75P2 | 60 / 190 | 14 / 6 | 42 | 1.700 / 160 | 75 x 60 | |
|
| VM78P4 | 118 / 390 | 11 / 4 | 75 | 2800 / 175 | 78 x 97 | |
|
| VM8054 | 43 / 130 | 30 / 15 | 50 | 1.700 / 150 | 80 x 54 | |
|
| VM8080* | 43 / 130 | 20 / 15 | 50 | 2.000 / 150 | 80 x 80 | |
|
| VM102P2 | 208 / 645 | 12 / 8 | 105 | 4.200 / 325 | 102 x 80 | |
|
| VM108-2P30** | 230 / 700 | 30 / 25 | 108 | 8.000 / 750 | 108 x 125 | |
** durch andere Spulenkonfiguration ist eine höhere Kraft bei weniger Hub möglich
2-achsige Voice Coil Aktoren als Kippantriebe zur Laserstrahlablenkung
Der zweiachsige Voice-Coil-Aktor VMXY80 unseres Herstellers Geeplus ermöglicht eine Rotationsauslenkung um zwei Achsen und wurde z.B. für die Ablenkung optischer Strahlen wie z.B. Laserstrahlen oder Lichtstrahlen entwickelt und eignet sich ideal für die Datenübertragung zwischen hohen Gebäuden oder anderen Strukturen, die Bewegungen ausgesetzt sein können.
Das bewegliche Element ermöglicht eine reibungsfreie Rotation um die X- und Y-Achse mittels eines zweiachsigen Flexbearings. Für den Antrieb sorgen zwei Spulenpaare und radial magnetisierte Permanentmagnete. Wie bei allen Tauchspulenantrieben ist das Drehmoment proportional zum Erregerstrom, was zu einer unabhängigen Auslenkung je Achse je nach Strom führt. Als zuverlässige elektrische Verbindung der bewegten Spulen an die Außenwelt werden die bewährten FlexCircuit Flachbandkabel verwendet.
Prinzipiell ist das Konzept des VMXY Voice-Coil-Antriebs skalierbar und die Herstellung kleinerer oder größerer Geräte mit ähnlicher Konstruktion ist möglich, sofern die Mengen wirtschaftlich tragbar sind. Das Gerät mit einem Durchmesser von 80 mm nähert sich jedoch der oberen Größengrenze, für die Radialmagnete verfügbar sind. Größere zweiachsige Tauchspulenantriebe können mit segmentierten Magneten hergestellt werden, die ihrerseits leichter mit einer quadratischen Grundfläche gefertigt werden können.
Das aktuelle Design VMXY80 liefert eine Dauerkraft von ca. 0,8N auf einem Durchmesser von etwa 70mm; der Montage flansch misst 80x80mm bei ca. 31mm Bauhöhe. Die Spulenmasse ist ca. 3g, die Gesamtmasse 800g.

TAUCHSPULENMOTOREN OHNE EIGENLAGERUNG (CVC)
Die Tauchspulenmotoren der CVC Serie unseres Herstellers PBA sind Voice Coil Motoren ohne Eigenlagerung. Der Spulenkörper bietet Gewindebohrungen zur Befestigung, damit die bewegte Spule an ein Führungssystem angebunden werden kann. Die Drähte der Schwingspule sind im Wicklungskörper vergossen, so dass hier eine stabile Anbindung gewährleistet ist.
Als Servoregler für Tauchspulenantriebe (Voice-Coil-Antriebe) kommen unsere DC-Servoregler Junus (Strom- oder Geschwindigkeitsregelung (Back-EMF)) in Frage.
- 13 Baugrößen mit 16 bis 90mm Durchmesser (größere Versionen auf Anfrage!)
- kleinere Bauformen für Betrieb bei 12V , 24V 48V, größere bei 48V, 90V bis 400V (DC)
- Dauerkraft von 1 bis 120N
- Hub von 5 bis 40mm
- Tauchspulenmotoren in rechteckiger (flacher) Bauweise verfügbar!
- Tauchspulenantriebe (Voice-Coil-Antriebe) mit integrierter Lagerung und Encoder verfügbar

| Voice Coils CVC-Serie | Hub (mm) |
Spitzenkraft (N) |
Dauerkraft (N) 100°C* |
Spitzenstrom (A) |
Dauerstrom (A) 100°C* |
Kraftkonstante (in Mittelstellung) (N/A) |
Gegenspannungs- konstante (in Mittelstellung) (V/m/s) |
Spulenwiderstand (bei 25°C) (Ohm) |
Induktivität (mH) |
max. Betriebsspannung (V) |
Spulen- masse (g) |
Pott- Masse (g) |
| CVC16-SF-5 | 5 | 4,04 | 0,71 | 5,06 | 0,892 | 0,80 | 0,80 | 1,7 | 0,14 | 48 | 5 | 10 |
| CVC19-SF-6 | 6,4 | 5,90 | 1,03 | 4,54 | 0,793 | 1,3 | 1,3 | 2,83 | 0,29 | 48 | 5 | 23 |
| CVC20-SF-10 | 10 | 8,21 | 1,43 | 4,28 | 0,746 | 1,92 | 1,92 | 3,67 | 0,44 | 48 | 10 | 32 |
| CVC24-SF-12 | 11 | 13,52 | 2,39 | 4,25 | 0,750 | 3,18 | 3,18 | 4,77 | 1,2 | 48 | 18 | 45 |
| CVC26-SF-7 | 7 | 17,11 | 3,01 | 2,90 | 0,510 | 5,9 | 5,9 | 11,16 | 2,95 | 48 | 16 | 53 |
| CVC30-SF-15 | 15 | 22,66 | 3,97 | 3,13 | 0,548 | 7,24 | 7,24 | 11,26 | 2,38 | 48 | 25 | 100 |
| CVC30-SF-30 | 30 | 16,24 | 5,13 | 3,96 | 1,25 | 4,10 | 4,10 | 6,70 | TBD | 48 | 45 | 198 |
| CVC35-HF-8 | 8 | 144,00 | 25,20 | 4,00 | 0,700 | 36,00 | 36,00 | 19,50 | 8,24 | 48 | 110 | 390 |
| CVC38-SF-10 | 10 | 42,09 | 7,32 | 3,76 | 0,653 | 11,21 | 11,21 | 10,35 | 3,47 | 48 | 45 | 168 |
| CVC40-SF-5 | 5 | 34,09 | 5,92 | 4,41 | 0,766 | 7,73 | 7,73 | 5,15 | 1,44 | 48 | 23 | 78 |
| CVC40-HF-6.5 | 6,5 | 92,42 | 16,09 | 3,59 | 0,642 | 25,78 | 25,78 | 16,03 | 5,52 | 48 | 75 | 255 |
| CVC40-HF-12 | 12 | 75,30 | 12,80 | 3,00 | 0,51 | 25,1 | 25,1 | 22,21 | TBD | 96 | 85 | 320 |
| CVC40-SF-20 | 20 | 47,92 | 8,34 | 3,13 | 0,545 | 15,31 | 15,31 | 17,50 | 5,59 | 48 | 60 | 230 |
| CVC44-SF-13 | 13 | 54,32 | 9,41 | 5,60 | 0,970 | 9,70 | 9,70 | 6,00 | 1,25 | 48 | 40 | 300 |
| CVC50-SF-30 | 30 | 74,91 | 13,14 | 4,23 | 0,742 | 17,71 | 17,71 | 15,19 | 4,14 | 48 | 100 | 526 |
| CVC60-SF-25 | 25 | 120,33 | 20,90 | 5,85 | 1,016 | 20,57 | 20,57 | 9,65 | 3,26 | 48 | 20 | 668 |
| CVC60-HF-20 | 20 | 218,50 | 37,72 | 4,75 | 0,820 | 46,00 | 46,00 | 24,00 | 15,40 | 120 | 410 | 1140 |
| CVC90-HF-20 | 20 | 640,74 | 111,41 | 15,77 | 2,742 | 40,63 | 40,63 | 3,45 | 4,88 | 120 | 1190 | 2425 |
 |
|||||||||||||||||
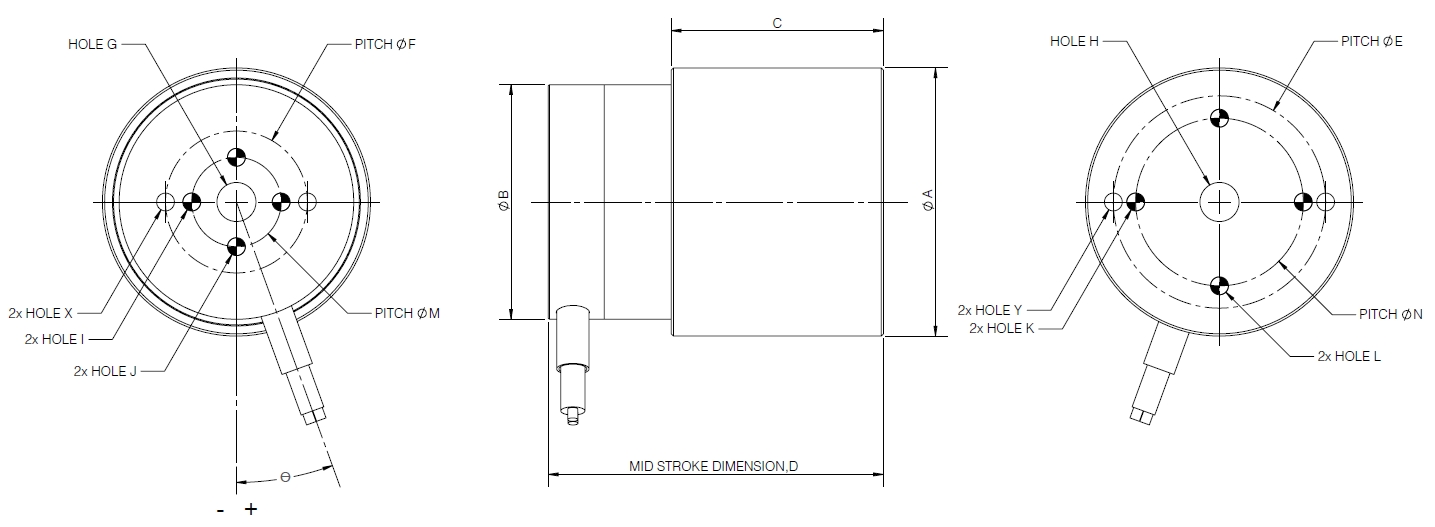
| Abmessungen Voice Coils CVC-Serie |
A(mm) | B(mm) | C(mm) | D(mm) | E(mm) | F(mm) | G(mm) | H(mm) | I(mm) | J(mm) | K(mm) | L(mm) | M(mm) | N(mm) | X | Y | Φ |
| CVC16-SF-5 | 16,0 | 13,4 | 10,8 | 16,5 | 7,0 | 7,0 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M2,5 | M2,5 | 10° |
| CVC19-SF-6 | 19,0 | 15,7 | 15,8 | 24,0 | 9,0 | 9,0 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M3 | M3 | 25° |
| CVC20-SF-10 | 20,0 | 16,6 | 19,0 | 31,0 | 10,0 | 10,0 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M3 | M3 | 20° |
| CVC24-SF-12 | 24,0 | 21,0 | 19,0 | 30,0 | 19,0 | 12,7 | ⌀3,5(H7) | ⌀1,6 | N/A | N/A | N/A | N/A | N/A | N/A | M2 | M2 | 20° |
| CVC26-SF-7 | 26,0 | 22,0 | 20,0 | 27,5 | 12,0 | 12,0 | M3 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M2;M2,5;M3 | M3 | 20° |
| CVC30-SF-15 | 30,0 | 24,6 | 24,5 | 39,0 | 16,0 | 12,6 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M3 | M3 | 20° |
| CVC30-SF-30 | 30,0 | 25 | 43 | 64,8 | 21 | 14 | ⌀3,0(H7) | ⌀3,0 | N/A | N/A | N/A | N/A | N/A | N/A | M3 | M3 | 30° |
| CVC35-HF-8 | 35,0 | 30,4 | 80,8 | 92,5 | 27,0 | 12,6 | ⌀3,0(H7) | N/A | N/A | N/A | N/A | ⌀3,0(H7) | N/A | 27 | M3 | M3 | -25° |
| CVC38-SF-10 | 38,0 | 31,2 | 27,5 | 39,0 | 20,0 | 10,0 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M4 | M4 | 20° |
| CVC40-SF-5 | 40,0 | 34,0 | 12,0 | 17,5 | 20,0 | 20,0 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M4 | M4 | 20° |
| CVC40-HF-6.5 | 40,0 | 34,8 | 40,5 | 49,3 | 20,0 | 20,0 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M4 | M4 | -25° |
| CVC40-HF-12 | 40,0 | 33,2 | 44,7 | 55 | 20,0 | 20,0 | ⌀4,0(H7) | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M3 | M3 | 20° |
| CVC40-SF-20 | 40,0 | 33,2 | 32,5 | 49,8 | 20,0 | 20,0 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M4 | M4 | 20° |
| CVC44-SF-13 | 44,0 | 37,2 | 31,8 | 44,5 | 25,4 | 19,1 | ⌀6,5(H7) | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M4 | M4 | 20° |
| CVC50-SF-30 | 50,0 | 42,4 | 43,0 | 67,6 | 20,0 | 20,0 | ⌀4,0(H7) | ⌀4,0 | N/A | N/A | N/A | N/A | N/A | N/A | M4 | M4 | 30° |
| CVC60-SF-25 | 60,0 | 50,6 | 43,5 | 66,1 | 30,0 | 30,0 | N/A | N/A | N/A | N/A | N/A | N/A | N/A | N/A | M5 | M5 | 20° |
| CVC60-HF-20 | 60,0 | 52,0 | 90,0 | 118,0 | 44,0 | 44,0 | ⌀8,0(H7) | ⌀8,0( | ⌀3,0(H7) | N/A | ⌀3,0(H7) | N/A | 32 | 32 | M5 | M5 | 20° |
| CVC90-HF-20 | 90,0 | 81,6 | 90,0 | 109,4 | 48,0 | 48,0 | ⌀12,0(H7) | ⌀12,0 | N/A | ⌀4,0(H7) | N/A | ⌀4,0(H7) | 40 | 34 | M6 | M6 | 35° |
Rechteckige (flache) TAUCHSPULENMOTOREN OHNE EIGENLAGERUNG (RVC)
Die rechteckigen Tauchspulenmotoren der RVC Serie unseres Herstellers PBA sind Voice Coil Motoren ohne Eigenlagerung. Diese kleinen Linearmotoren bestehen aus einem Magnetteil und einer extrem leichten Spule, so dass sie sich extrem gut für Anwendungen mit kurzem Hub bei ultra-hohen Frequenzen eigenen. Der Spulenkörper der Schwinspule bietet Gewindebohrungen zur Befestigung, damit die bewegte Spule an ein Führungssystem angebunden werden kann. Die Drähte der Schwingspule sind im Wicklungskörper vergossen, so dass hier eine stabile Anbindung gewährleistet ist.
Als Servoregler für Tauchspulenantriebe kommen unsere DC-Servoregler Junus (Strom- oder Geschwindigkeitsregelung (Back-EMF)) in Frage.
- 3 Baugrößen
- Betrieb bei 24V, 48V, 60V (DC)
- Dauerkraft von 4 bis 27N (Spitze 15 bis 81N)
- Hub bis 20mm
- Baugrößen: 74x16x39mm / 84x26x54mm / 91x32x69mm
- rechteckige Tauchspulenantriebe mit integrierter Lagerung und Encoder verfügbar!
 Voice-Coil-Aktuator, Tauchspulenmotor")
| Flache Voice Coil Motoren RVC-Serie | Hub (mm) |
Spitzenkraft (N) |
Dauerkraft (N) 100°C* |
Spitzenstrom (A) |
Dauerstrom (A) 100°C* |
Kraftkonstante (in Mittelstellung) (N/A) |
Gegenspannungs- konstante (in Mittelstellung) (V/m/s) |
Spulenwiderstand (bei 25°C) (Ohm) |
Induktivität (mH) |
max. Betriebs- spannung (V) |
Spulen- masse (g) |
Gesamt- Masse (g) |
Luft- spalt (mm) |
| RVC1-S20D | 20 | 15 | 4,1 | 4,4 | 1,2 | 3,4 | 3,4 | 2,4 | 0,45 | 48 | 0,021 | 0,191 | 0,5 |
| >RVC2-S20D | 20 | 41,5 | 11,6 | 5,0 | 1,4 | 8,3 | 8,3 | 3,7 | tbd | 60 | 0,057 | 0,487 | 0,6 |
| >RVC3-S20D | 20 | 80,7 | 26,9 | 7,8 | 2,6 | 10,4 | 10,4 | 2,0 | tbd | 60 | 0,070 | 0,888 | 0,8 |
TAUCHSPULENANTRIEBE MIT LAGERUNG UND ENCODER (CVCA)
Die Tauchspulenantriebe (Voice-Coil-Antriebe) der CVCA-Serie nutzen die Tauchspulenmotoren (Voice-Coil-Motoren) der CVC-Serie und integrieren diese in ein mechanisches System mit Kreuzrollenlagerung und Encoder. Die so entstehenden Linearaktoren sind extrem dynamische, robuste und zuverlässige Linearantriebe für Bewegungen mit kurzem Hub und eignen sich z.B. für Maschinen in der Halbleiterbrache oder der optischen Industrie.
Als Servoregler kommen unsere Accelnet Servoverstärker mit DC Einspeisung und Encoderfeedback in Frage.
- Kreuzrollenlager für hohe Genauigkeit und Steifigkeit
- keine Rastkraft
- geringe bewegte Masse, schnelle Reaktionszeit
- Encoder mit Auflösungen bis 100nm integriert
- hohe Zuverlässigkeit

FLACHE TAUCHSPULENANTRIEBE MIT LAGERUNG UND ENCODER (RVCA)
Die Tauchspulenantriebe (Voice-Coil-Antriebe) der RVCA-Serie sind fertige Linearaktuatoren für kurzen Hub mit sehr hoher Frequenz mit Kreuzrollenlagerung und Encoder in sehr flacher Ausführung. Standardmäßig sind die Tauchspulenmotoren (VCM) mit einer Rückstellfeder ausgestattet. Die Linearaktoren der RVCA-Serie sind extrem dynamische, robuste und zuverlässige Linearantriebe für Bewegungen mit kurzem Hub und eignen sich z.B. für als z-Achse in Pick&Place-Anwendungen in der Halbleiterbrache oder der optischen Industrie.
Als Servoregler kommen unsere Accelnet Servoverstärker mit DC Einspeisung und Encoderfeedback in Frage.
- ideal für High-Speed-Pick&Place Anwendungen
- Kreuzrollenlager für hohe Genauigkeit und Steifigkeit
- keine Rastkraft
- geringe bewegte Masse, schnelle Reaktionszeit für ultra-hohe Frequenzen
- Rückstellfeder integriert
- Encoder integriert (Auflösung bis 100nm)
- einfache Integration, Plug&Play
- hohe Zuverlässigkeit

 SEITE DRUCKEN |
SEITE DRUCKEN |